 |
Output and efficiency
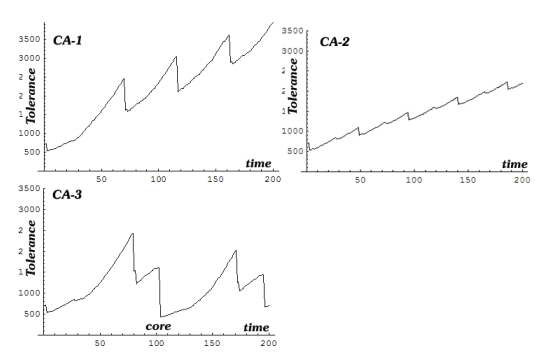
Resources generated at one instant (step) are called product (input). One part of the product becomes permanent CA structure (CA core). The other called output (CA rim) is delivered to the environment.
delivery activation:
[state[1, set point = p[1] - 0.1, state[0, k]]; {k,1,46}
delivery: [2, 1, While[p[1] > set
point], 2];
delivery: [1, 2, While[p[2] > set
point], 2];
change state: [state[1, i+1]
= state[0, k], state[1, k]]; {k,1,46}
change state: [state[2, i+1]
= state[0, k], state[2, k]];
augment state: [state[1, i+1]
+= state[2, i], While[p[2] > p[1]]
augment state: [state[2, i+1]
+= state[1, i], While[p[1] > p[2]]
 |
 |
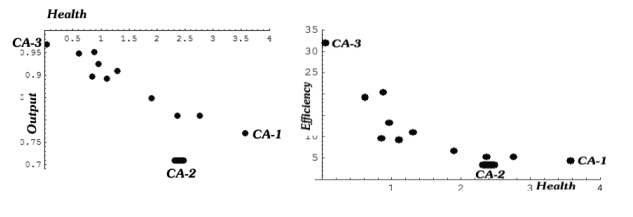
The graphs depict health and output.
Most CA aligned along the centeral line were isolated (like CA-2).
CA-1 is the healthiest with a moderate output.
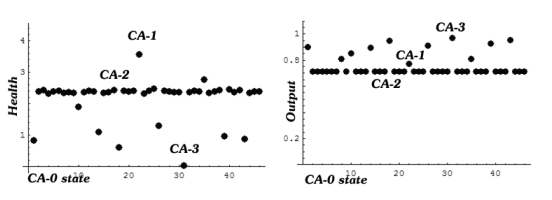 |
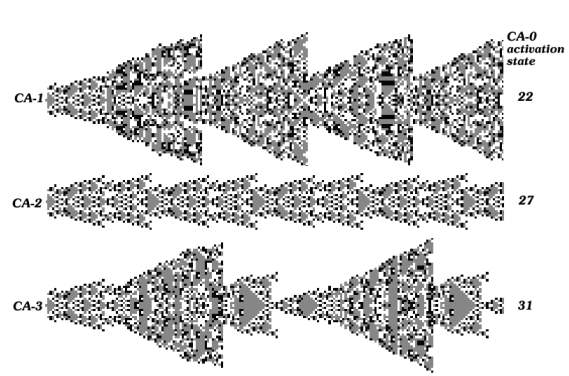
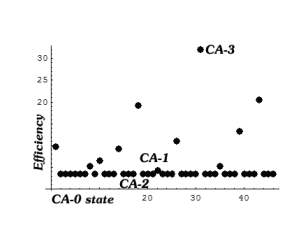
Efficiency is defined as Max[velocity] / Min[velocity]. CA-3 is the most efficient since its core is very narrow.
 |
Output and efficiency are negatively correlated with health. Roughly, the health ordinate is driven by velocity, and the output or efficiency ordinates, by the m-factor. However the m-factor may also accelerate velocity and improve health.
 |
In summary:
Velocity: Accumulations of resources
in the core.
Input or product: resources generated in one step.
(core + rim).
Output (rim): Max[velocity] - Min[velocity] / Max[velocity]
m : Min[velocity]/Max[velocity]
Health: velocity * Min[velocity] / Max[velocity]
= velocity * m
Efficiency: Max[velocity] / Min[velocity]
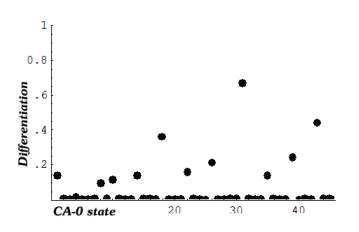
Differentiation
The isolated CA is the least differentiated. As CA interact their structure changes and they differentiate. Differentiation is controled by the m-factor, which actually controls Min[velocity] and Max[velocity]. Both may applied to measure differentiation. First let's define a CA state vector:
State[CA] = {velocity, output, efficiency).
State[CA-0] = {velocity0, output0, efficiency0}. The isolated CA-0
(stem process) serves as reference.
Differentiation[CA] = { (velocity-velocity0)^2 + (output-output0)^2
+ (efficiency - efficiency0)^2} ^0.5
Differentiation[CA] normalized = Differentiation[CA] / Norm[Differentiation[CA]].
 |