 |
Embodiment is an approach to Artificial Intelligence that maintains that the only way to create general intelligence is to use programs with 'bodies' in the real world (i.e. robots). According to R. Brooks we function in the world simply by being part of it. He implements these ideas in his robots in the form of the subsumption architecture. George Lakoff says that: Anything we can think or understand is shaped by, made possible by, and limited by our bodies, brains, and our embodied interactions in the world."
Yet what are these bodies which control our reasoning? For neuroscientists embodiment means the central nervous system (CNS) and its sensory organs. Some include also the autonomous nervous system which among other conveys our emotions. Which leaves out myriad processes in the body. This process set is defined here as the Wisdom of the Body (WOB), which is our real embodiment.
Actually WOB has two meanings. It is the process set, as well as its controlling entity, or wisdom. Its simple implementation has been described in a previous chapter . The system is stable. Whenever perturbed it always finds its new steady state, or solution, which is determined by the entire CA set. Each solution is embodied by the entire CA set.
The present applet was designed to let you experience this CA embodiment.
The CA is controlled by the following buttons:
Plant : Plants a zygote.
Shorter: Makes CA shorter
Longer: Makes CA longer
Obstacle: A toggle switch which places an obstacle
at x=15.
Move obstacle+ moves it downward.
Move obstacle- moves it upward.
Kill CA
Injure: Replaces the upper CA bit with a zero (white).
Plant a zygote
and watch the CA advancing. Clicking on injure replaces the upper border bit with a zero (white).
It will affect the CA (injure it) only if the border bit was not zero.
When injured the perturbed CA loses its symmetry and oscillates chaotically.
It either regains its initial attractor of 46 states or settles at an
attractor of 29 states . Otherwise it dies.
Try to make
the CA move upward or downward.
Injury activates the CA memory
Although injury is localized (one bit) the entire CA responds. Which illustrates a genuine embodiment. Each CA state has the following functions:
1. Initial
state for the next state.
2. Memory which may initiate an action.
3. Accumulates resources.
Injury will affect all of them.
Non linear programming
Initially the CA is isolated and oscillates at a period of 46. Interaction with the environment forces it to react. Here injury activates a repertory which changes structure. Each CA state will react to the injury in a different way. Each state is thus an action memory which is triggered by the injury.
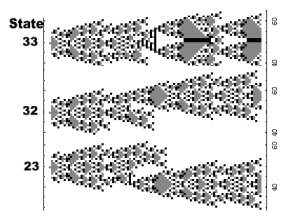
Suppose that you wish to program the CA to move upward or downward and stay there. In other words, it has to attain a solution otherwise it may die. You experiment and look for two parameters which initiate this movement: 1. The injured CA state and 2. The position of the injured bit.
The image depicts three solutions which were attained after injuring the respective states. The first assumed a 29 state attractor and did not move sideward.
 |
Additional reading: Injury and Repair