|
|
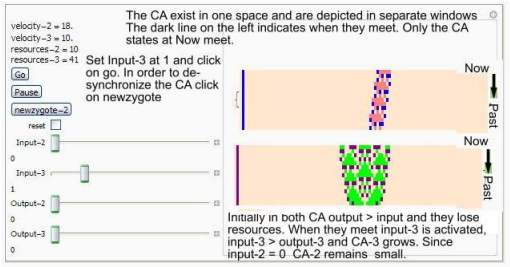
CA interaction
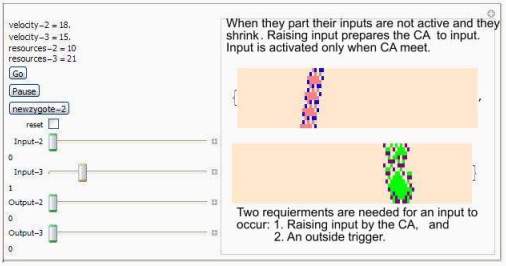
When two CA meet they may not interact. In order to do so
they have to raise their inputs. Here it is done by you (the obsever). In
future experiments the CA will raise its input by itslef. Raising input is an
anlog to volition.
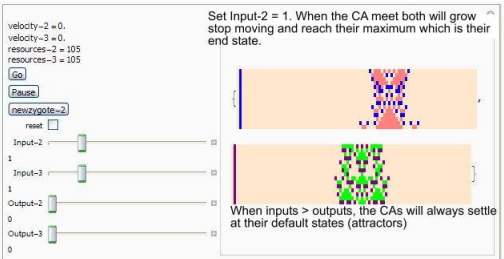
When two CA meet and their inputs are raised, they will always settle
at an attractor. When their outputs = 0 they will settle at an
attractor with the highest amount of resources. The two CA system as a whole
has an end purpose (it is teleological), to maximize resources.
At any input output configuration it will settle at an attractor with the
hihgest amount of resources. It maximizes its resources in any given circumstances.
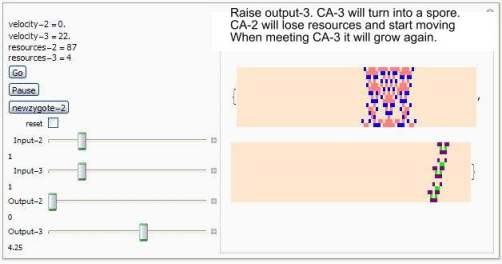
The system can optimize only of its two CA interact. Yet
in order to interact they have to move. When reaching their final state
they will stop moving.