 |
CA attraction
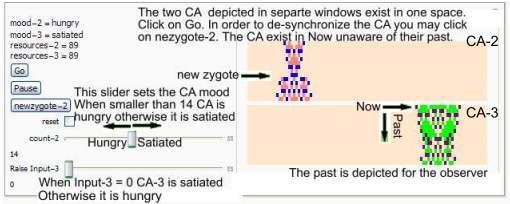
The CA in previous experiments had one sense, a sense of touch. During an encounter with an obstacle or another CA it sensed them and decided whether to interact or not. Here the CA is endowed with a sense of remote objects, like vision with which it spots remote CA.
When CA-2 spots CA-3 it follows it wherever it moves.
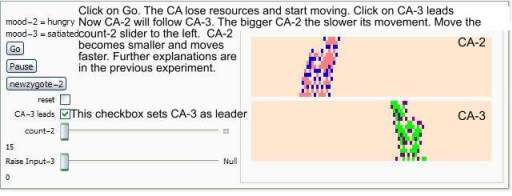
Its reaction depends on its size (resources). A heavy CA will move slower
than a slim one. CA-3 is independent When the “CA-3 leads “ checkbox
is on, CA-3 is the leader followed by CA-2. When the “CA-3 leads “ checkbox
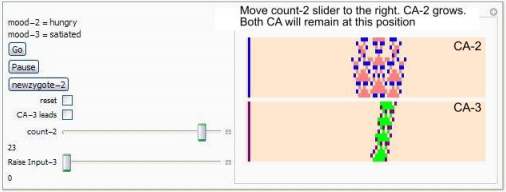
is off CA-3 is attracted to CA-2 and moves toward it. Since both are attracted
to each other, when they meet they will stop moving and remain together.
In previous experiments when a hungry CA met a satiated
one it grew, and for a while may have remained at their meeting point.
However the satiated CA rushed away and soon the other started moving again.
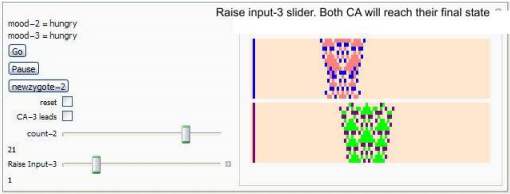
In the present experiment, regardless their mood or size, both CA will remain
together. After all they are attracted to each other.
When losing resources the CA starts moving around searching
for new resources. It can accumulate resources only when interacting
(cooperating) with a CA. When spotting a CA it expects to benefit
from their cooperation.
In summary:
A CA cannot accumulate resource by itself. It has to cooperate
with another one. The sense of touch informs it when it
encountered another CA and cooperation is possible. The sense of
remote objects (vision) directs it to a cooperating entity. When
moving around the CA only hopes to find resources,
yet the spotting of another CA raises its expectation to gain resources
(by cooperation).